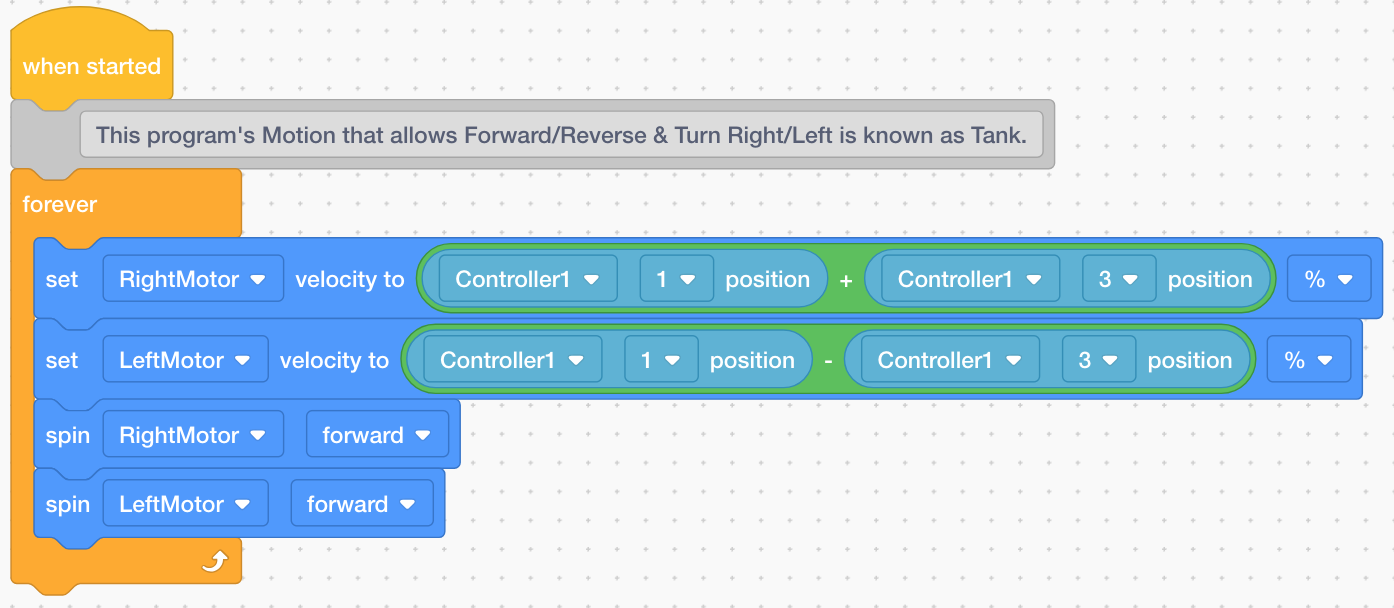
Now try this code. It is known as a "Tank" motion program. It will allow the robot to move forward and backward with the left joystick and it will be able to turn with the right joystick.
Programming Your V5 Controller
Note: Normally we use "Drivetrain" and not "Motors" when programming motion. I am asking you to use "Motors" instead of "Drivetrain" in this one instance where we are learning how to program the "Controller." When you complete this assignment and I sign off, then you have the choice of using Motors or Drivetrain as you prepare for the competition.
1. Controller Programming Gradesheet
This Gradesheet will explain what you need the Controller to do. Grade Sheet.
2. Controller Programming Guide:
The following Step-By-Step Guide shows you how to Select A Device (eg. Controller) and how to configure the Buttons on the Controller. Click Here.
3. My Controller Programming Hints!
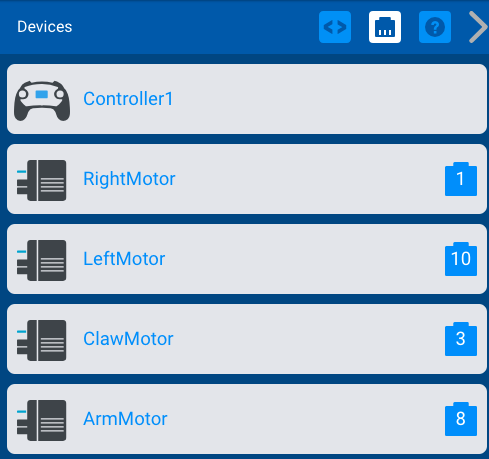
The image below shows the Devices you will need to activate in order to successfully meet all the points required on the Rocket League Challenge Gradesheet.
Note: After you finish programming your controller and you find that it does not function correctly, check to make sure that the port that the motor is connected to on the Brain matches the port number you selected for the motor in the Device Window.
How Do I Program My Controller:
Helpful Hint: In order to save time... "Copy&Paste" the code from one program you write to another...just click on the segment of the code you would like to copy, then select "Control" "C" - open the new program and "Control" "V". It will appear!
Set Motor Velocity for a "Motor" gives two options:
|
Now try this code. It is known as a "Tank" motion program. It will allow the robot to move forward and backward with the left joystick and it will be able to turn with the right joystick.
|
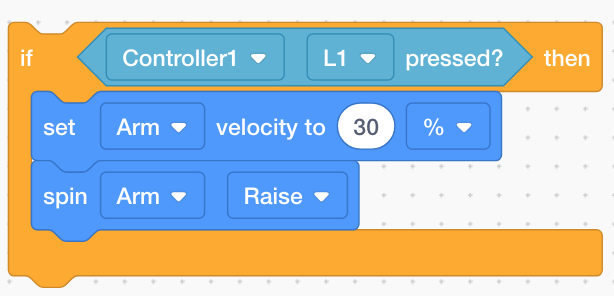 |
Use this code to get the robot arm to go up and down and claw to open and close. You need to write an If/Then statement for each of these actions. Place them in the Forever Loop that you created above. |
Downloading This New Program Into My Controller:
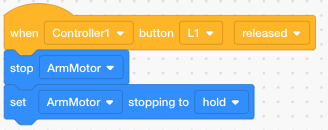
How Do I Stop My Robot Arm From Descending and Claw from Releasing?